
«Медузоид» из сердца крысы и киборги из лягушачьей икры Что такое гибридные роботы с живыми клетками и как они работают
Исследователи из Университета Тафстса придумали новый метод создания миниатюрных киборгов — роботов, сделанных из настоящих живых клеток. Теперь даже процесс их проектирования не нуждается в человеке и отдан на откуп компьютеру. Утверждается, что придуманные и построенные таким образом микроскопические «живые устройства» смогут доставлять лекарства в нужные точки организма или даже самостоятельно проводить операции. Однако пока до практического применения еще очень далеко — сейчас главная задача биоинженеров в том, чтобы многочисленные живые футуристические устройства хотя бы просто работали.
Новая работа исследователей лежит на стыке двух относительно молодых и довольно популярных направлений в робототехнике: миниатюризации и использования живых клеток в искусственных устройствах.
Преимущества минатюризации вполне понятны: если создание микроскопических роботов станет работающей технологией, это позволит запускать управляемые устройства туда, куда традиционные большие роботы добраться не могут: от завалов при землетрясениях до, например, кровеносной системы человека. Исследования в этом направлении ведутся очень активно — достаточно вспомнить, например, многочисленных «спермаботов», которые позволяют манипулировать отдельными сперматозоидами.
Плюсы от использования живых клеток при проектировании роботов менее очевидны. Все-таки они довольно требовательны к рабочей среде, нуждаются в регулярном питании и дыхании, в точной терморегуляции и соблюдении многих других условий жизни. Однако авторы новой статьи, как и многие другие ученые, полагают, что у живых систем есть по крайней мере два важнейших преимущества перед неживыми: естественная способность к самоорганизации и, что еще важнее, регенерации.
Как сделаны новые киборги — и причем здесь лягушки
Те живые роботы, о которых идет речь в новой статье, представляют собой конгломераты вполне обычных клеток лягушки, которые ученые получили из эмбрионов животных. В них нет даже каких-либо искусственных имплантатов или синтетических материалов. При этом нормальными лягушками они, конечно, уже не являются: они не способны вырасти в здоровое животное, а их клетки в ходе производства фактически пересобрали в совершенно новую структуру.
Сделано это было следующим образом. Вначале авторы ввели в оплодотворенную икру шпорцевой лягушки Xenopus laevis (это классический лабораторный объект) специальный генетический материал, матричную РНК. У инъекции была двойная цель: во-первых, нужно было заставить клетки, уже получившие в эмбрионе разную специализацию, по-разному светиться в ультрафиолете, что можно было бы использовать для контроля за последующими стадиями процесса. Во-вторых, таким образом ученые хотели отключить те биологические пути, которые отвечают за появление на поверхности некоторых клеток ресничек — органелл, способных к согласованному движению и, например, помогающих удалять мусор из легких. Поскольку основой для движения живых роботов должны были стать мышечные клетки, а не реснички, то работа последних могла только помешать эксперименту.
После такой инъекции эмбрионы лягушек вскрывали, разделяли эмбриональные клетки по типам и получали клеточную взвесь, которая и была основным строительным материалом для живых роботов. Здесь присутствовали два основных типа клеток: предшественники мышечных клеток сердца, способные самопроизвольно сокращаться, и клетки-предшественники эпидермиса, которые выполняли роль пассивного балласта. И те, и другие в несколько стадий послойно переносили в специальные микроскопические ячейки, и там они уже самостоятельно собирались в агрегаты. Здесь никакого особого вмешательства ученых не требовалось: поскольку на поверхности клеток всех животных есть специальные контактные белки, то соединялись в агрегаты они самопроизвольно.
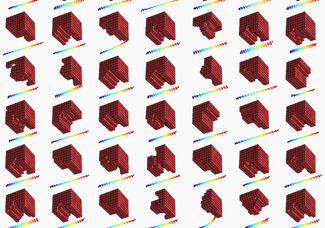
Наконец, получившиеся агрегаты клеток ученые доводили до нужной формы с помощью техники, напоминающей работу скульптора: вооружившись пинцетами и металлической петлей, авторы просто удаляли лишний материал, чтобы исходный клеточный агрегат приобрел заранее рассчитанную на компьютере форму. Получившиеся «живые скульптуры» ученые высаживали на специальную поверхность и уже там наблюдали за их движением.
Судя по опубликованным результатам, ученым действительно удалось добиться направленного движения от этих довольно примитивных клеточных агрегатов: наиболее успешные образцы преодолевали за минуту расстояние в 6-7 длин собственного тела. При этом направленность движения определялась формой живых роботов — когда их переворачивали в непредусмотренное положение (на «спину»), те же клетки просто беспомощно сокращались, а робот оставался на одном и том же месте.
Таким образом авторы получили не только роботов-бегунов, но также чистильщиков и носильщиков. Первые оказались способны расчищать осадок с подложки, по которой они двигались кругами. Вторые получили в теле специальное отверстие, в котором можно было бы закрепить любой подходящий груз — например, требующее доставки лекарство.
Отдельным классом живых роботов стали клеточные агрегаты, которые во время движения могли произвольно сцепляться и взаимодействовать друг с другом. Все эти варианты эксперимента были спроектированы и проведены отдельно друг от друга, и результатом стали разные формы живого устройства.
Главное новшество статьи — не сами роботы, а эволюционные алгоритмы, которые могут проектировать киборгов-на-заказ
Клеточные автоматы, полученные в результате эксперимента, действительно могут двигаться, делают это относительно предсказуемым образом и даже способны, как и полагается живым системам, залечивать небольшие повреждения (это ученые проверили в отдельном эксперименте).
Однако ни сейчас, ни в ближайшем будущем никакого практического применения конкретно от этих устройств ждать не следует: во-первых, ими пока никак нельзя управлять, ведь двигаются нынешние «автоматы» совершенно самостоятельно. Во-вторых, сам процесс их производства, который требует участия человека и хирургической точности в обработке клеток-«заготовок», не готов к масштабированию, а значит и к практическому применению.
Однако, по задумке авторов статьи, ни сами устройства, ни метод их производства (который можно было бы заменить трехмерной печатью) — далеко не самые важные результаты работы. Наиболее заметное новшество — это подход к проектированию таких систем, который основан не на классической инженерии, а на эволюционных алгоритмах, то есть на использовании принципов биологической эволюции для создания искусственных систем.
Вообще говоря, эволюционные алгоритмы известны очень давно, как минимум с середины прошлого века. Это целое семейство подходов к вычислению, в основе которых лежит идея искусственной симуляции эволюции, когда одно поколение программ или виртуальных устройств по каким-то правилам сменяется другим, более эффективным для своей задачи (подробнее о них можно почитать здесь).
Например, специалисты по искусственному интеллекту не раз пробовали «с нуля» создавать роботов, способных использовать какие-то необычные способы передвижения, до которых человек мог бы и не додуматься. Для этого обычно берут набор самых примитивных строительных элементов, связи между ними записывают в «гены», которые передаются только наиболее эффективными виртуальными устройствами — и все это симулируется в какой-то физической среде, после чего одно поколение сменяется другим, более эффективным. Как виртуальная эволюция может работать прямо в страничке браузера, можно увидеть, например, здесь.
Однако эволюционные алгоритмы до сих пор еще никогда не применялись для проектирования гибридных роботов. Уже сейчас таких устройств известно не меньше десятка, но все они в той или иной степени имитируют поведение и способ движения своих природных прототипов: медуз, рыб, скатов и так далее. По задумке ученых, использование эволюционных алгоритмов позволит избавиться от этого ограничения и придумывать для живых роботов совершенно новые формы.
Устроено это проектирование-без-человека следующим образом. Исходно система получает от ученых всего два параметра: набор строительных блоков (в данном случае — сокращающиеся мышечные клетки сердца и пассивные клетки эпидермиса) и цель для оптимизации (например, скорость движения). После этого компьютер сам создает набор возможных форм для робота, просчитывает, какие из них можно создать с учетом ограничений сегодняшней технологии (например, удаляет варианты со слишком мелкими деталями), а затем проводит виртуальные испытания.
Те формы, которые хорошо показали себя в расчетах, отправляются в производство, а результаты реальных испытаний снова используют в расчетах — теперь уже для уточнения работы симуляции.
Таким образом, по задумке авторов, можно будет по одной и той же технологии автоматически проектировать и создавать (например, на клеточном принтере) роботов для любых задач. Сами авторы говорят о двух наиболее амбициозных применениях: транспорте лекарств и автономной микрохирургии прямо внутри организма.
«Роболягушки» — не первые киборги с живыми клетками. До них были робот-скат и, конечно, «медузоид» из клеток сердца крысы
Несмотря на необычный подход к дизайну, получившиеся роботы оказались далеко не самыми футуристичными устройствами с живыми клетками среди тех, что известны на сегодняшний день. Уже сейчас среди них есть такие, которые, кажется, могли бы существовать лишь на страницах художественной фантастики.
Считается, что впервые идея использовать живые клетки для создания роботизированных устройств пришла американским инженерам Монтеманье и Невесу, которые решили внедрить мышечные клетки в управление микромеханическими датчиками (MEMS) еще в 2002 году. Пару лет спустя инженеры Массачусетского технологического института и Университета Северной Каролины использовали мышцы взрослых лягушек для создания полноценной роботизированной рыбы — она плавала в специальном аквариуме с питательными веществами и антибиотиками (которые выступали в роли консервантов), а управлять ее движением можно было с помощью пары простых электродов.
Новый этап в создании гибридных роботов наступил в 2012 году, когда группа гарвардского ученого Кевина Паркера спустилась с уровня изолированных мышц на уровень отдельных мышечных клеток. Тогда ученые показали так называемый медузоид — устройство, представляющее собой эластичную основу в форме купола медузы, на которой были выращены отдельные мышечные клетки, выделенные из сердца крысы. Когда к аквариуму, где этот медузоид плавал, подавали напряжение, сокращение клеток приводило в движение синтетический купол и робот начинал двигаться — в точности как настоящая медуза.
Через несколько лет та же группа разработала еще более совершенного биоробота — примерно на том же принципе, но на этот раз в форме ската. Как и медузоид, робоскат состоял из эластичной синтетической основы, на которой были упорядоченно расположены живые мышечные клетки из сердца крысы (подробнее — здесь). Главное отличие робоската заключалось в том, что из-за направленной генетической модификации его клетки приобрели чувствительность к свету (в них были внедрены светочувствительные ионные каналы, которые активно используются в оптогенетике) — и управлять движением робоската можно было уже не электричеством, а лучом света.
Робомедузы, робоскаты и роборыбы — лишь отдельные яркие примеры устройств, в составе которых вместо электрических двигателей или эластичных актуаторов используются живые мышечные клетки. На самом деле их разнообразие уже очень велико: в их составе применяют и клетки сердца, и другие ткани млекопитающих, и даже клетки насекомых. Методам создания таких устройств посвящают специальные книги и обзоры.
Если же посмотреть на разнообразие гибридных устройств еще шире, то здесь можно будет вспомнить и про очень высокоуровневые «киберустройства» — например, жуков, управляемых дистанционно с помощью специально имплантированного устройства. И, наоборот, про устройства, в которых даже нет живых клеток, однако есть составляющие их элементы — например, полноценный оптический дисплей, в котором вместо жидких кристаллов используются клеточные органеллы — микротрубочки.
Александр Ершов